

用树莓派+nodejs开发物联网实时图传机器人
前言
项目的灵感来自皮克斯动画《机器人总动员》的主角瓦力(wall.e)。一个在末日的废墟中幸存并日复一日清洁着地球的可爱机器人。
这是一个十分有趣的物联网项目!它运行在基于arm架构的raspiberry(树莓派)开发板上。借助性能出色的node和多平台兼容的硬件框架johnny-five,我们创建了这个项目。 此项目包括了服务端到前端程序,开发语言选用javascript,功能上包括了视频监控,温度数据采集,远程遥控,距离测量,gps定位等功能。 欢迎对物联网感兴趣的开发人员Issues
仓库地址
https://github.com/zexiplus/WALL.E
技术栈
- johnny-five
- vue
- express
- chart.js
- mongoDB
目标功能
- [x] 支持视频实时监控 (完成)
- [x] 支持摄像头转动(完成)
- [x] 支持手动控制电机运行(完成)
- [x] 支持温度采集(完成)
- [ ] 支持gps定位
- [ ] 支持距离探测
- [ ] 支持循迹功能
- [ ] 支持自由巡航
环境配置和依赖
- 树莓派开发板(Raspberry Pi 3 Model B)
- ubuntu mate16.0.4操作系统
- node && npm
- MJPG-streamer
运行项目
项目下载
git clone https://github.com/zexiplus/WALL.E.git
cd WALL.E
npm install
开发模式运行web界面程序
npm run dev
// then open the browser at http://localhost:1234
生产环境运行web界面程序
npm run build
npm run local
//then open the browser at http://localhost:2999
运行服务端程序
npm run board
材料准备
| 模块 | 价格 | 数量 |
|---|---|---|
| 树莓派开发板 | ¥200 | 1 |
| 履带底盘 | ¥350 | 1 |
| AD转换器 | ¥15 | 1 |
| 红外传感器 | ¥3 | 6 |
| SG90舵机 | ¥15 | 1 |
| 树莓派摄像头 | ¥80 | 1 |
| 电池 | ¥30 | 1 |
| gps模块 | ¥50 | 1 |
| MPU6050集成传感器模块 | ¥20 | 1 |
接线说明
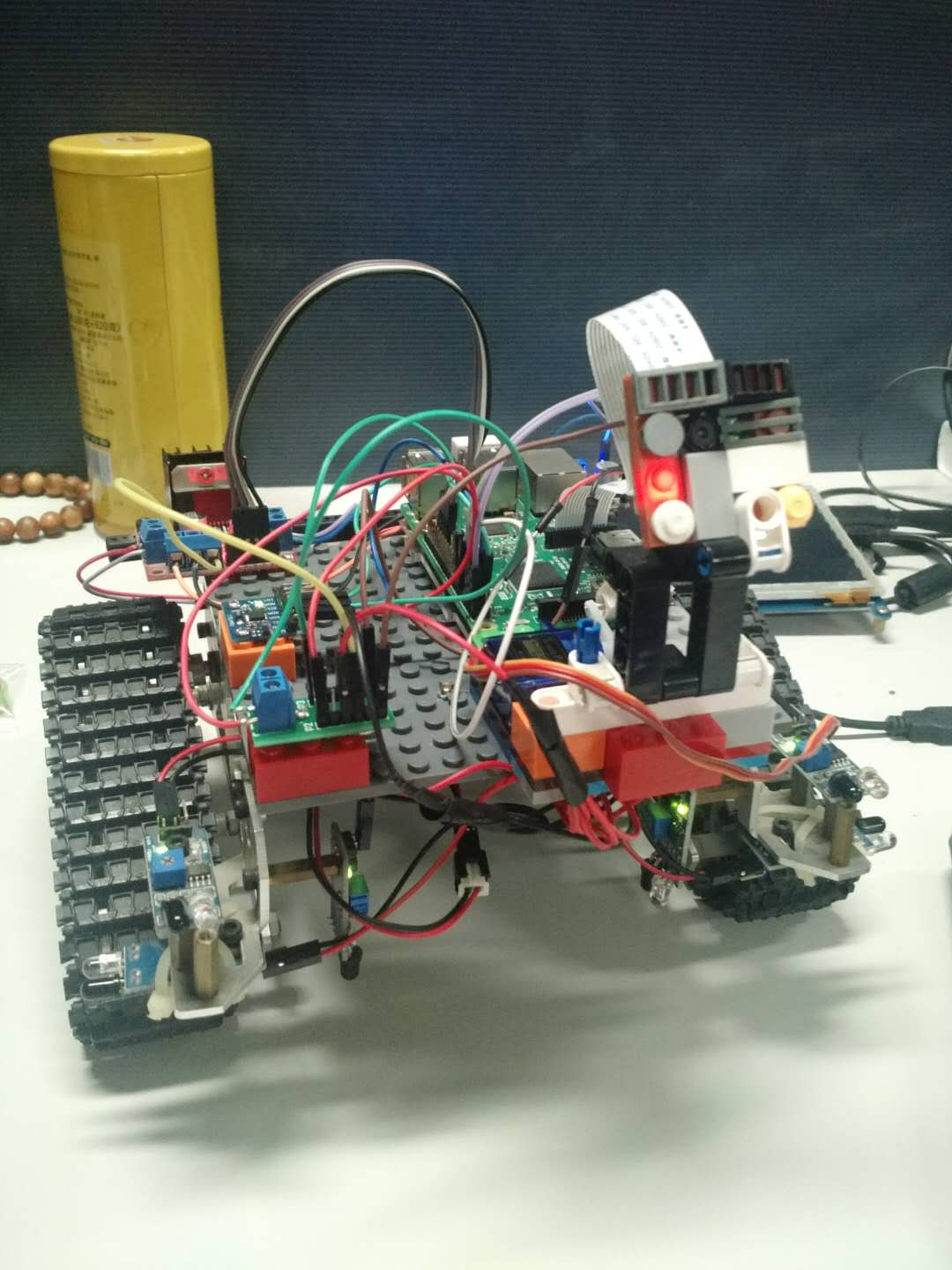
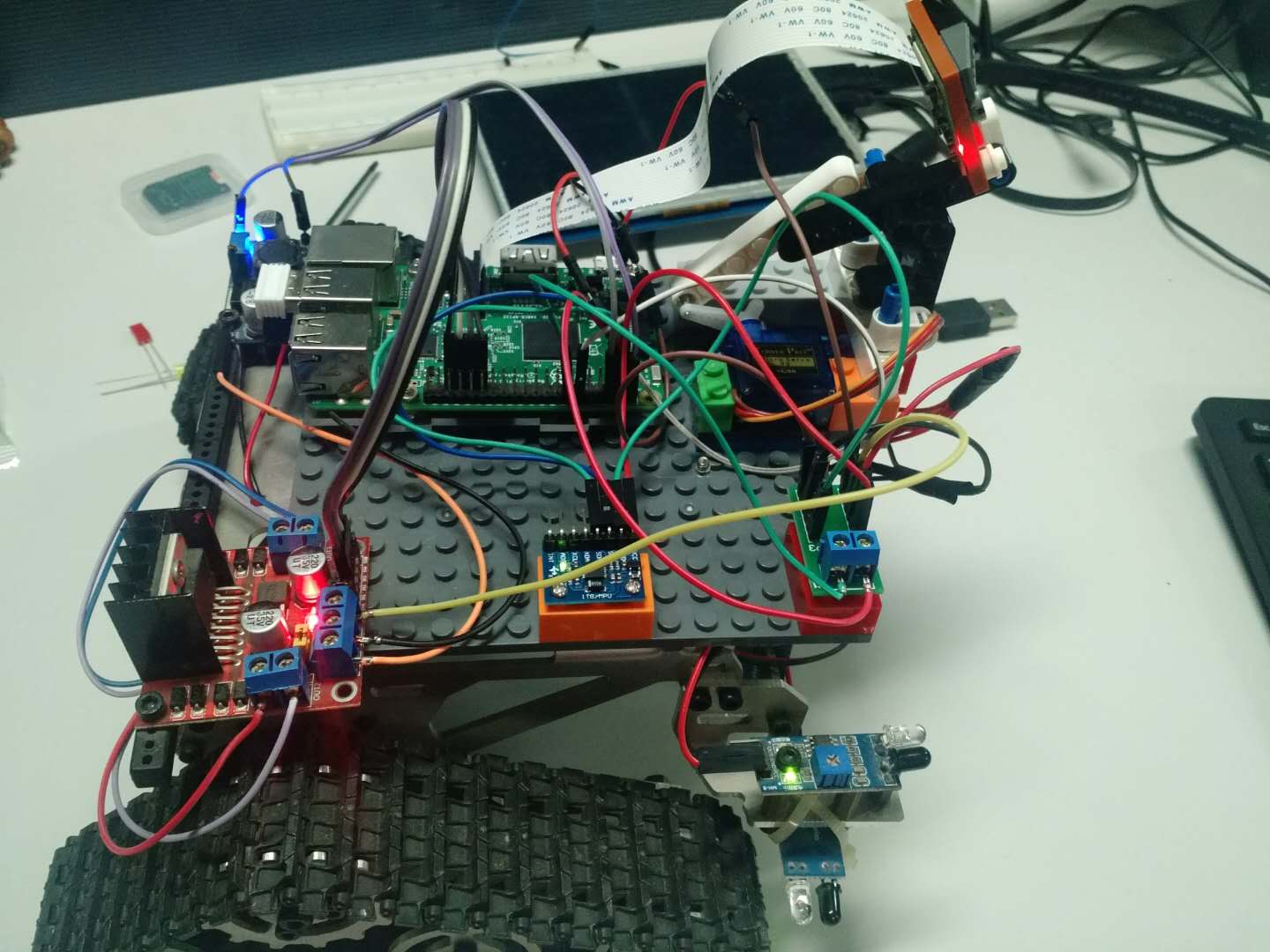
接线参考图如下
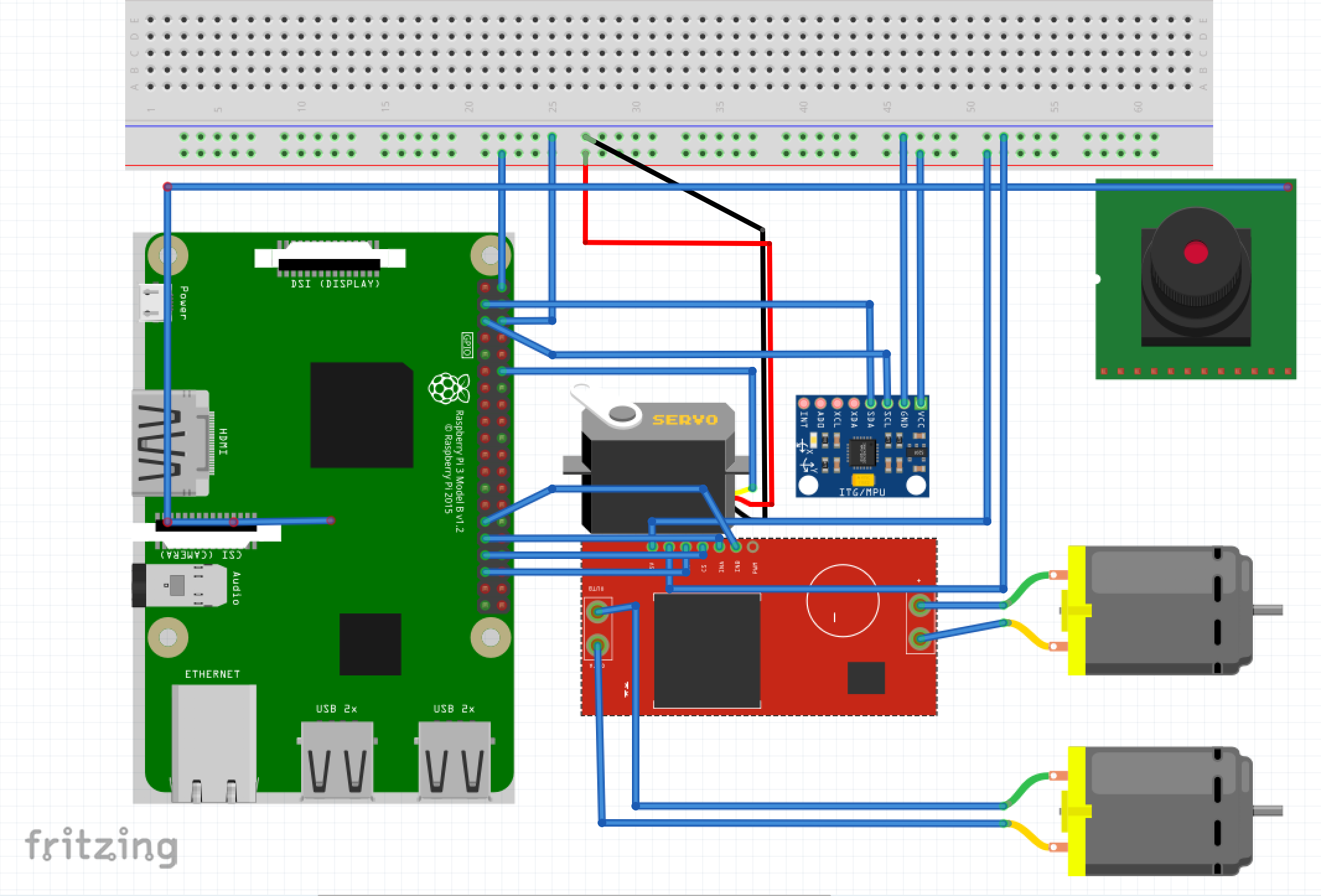
目前接入电路的模块有电机驱动模块,mpu6050集成模块,servo伺服电机模块,摄像头模块。
电机驱动模块接收io引脚发出的高低电平,输出12v的电压从而驱动电机。
servo伺服电机模块用来转动摄像头,摄像头固定于伺服电机支撑的转轴上。
mpu6050模块可以感知周边温度,测量加速度等。
由于gps模块的通信信道与wifi冲突,暂时无法引入,gps定位会在之后的版本中完成。
本项目树莓派io引脚采用wiringPi编码,如图

接线描述:
伺服电机的信号线接树莓派开发板 1引脚(wiringPi编码,下同)
mpu6050传感器SCL接树莓派开发板 3引脚,SDA接 2引脚
电机驱动模块四个输入端分别接树莓派 21,22,23,24 引脚
项目展示
项目维护人
协议
GPL
7 回复

希望喜欢瓦利和物联网的小伙伴关注给star, 想体验玩耍的小伙伴可以告诉我, 我可以运行公网模式(ngrok内网穿透),给你们发socket地址,让你们在线控制,(不要瞎撞哦)


